Non-contact torque sensors for intelligent cobots
When it comes to smart trends in industry and production, the term “cobot” comes up quickly. This is the name given to collaborative robots that work together with humans without any problems, protective fences or the like. How do cobots acquire a sense of touch so that they can act flexibly and interact safely with humans?
A robot is intelligent when it perceives its environment and reacts to it in order to perform complex tasks. To do this, intelligent robots need sensors that provide them with information about their environment. With the help of 3D cameras and laser scanners, for example, they perceive their environment optically. But optical systems can be impaired by unfavorable lighting conditions or dust. Just as a human uses various senses simultaneously and combines the individual perceptions in the brain to form an overall picture, an intelligent robot must use multimodal sensor technology to simultaneously detect and evaluate various physical events.

Equipped with torque sensors, humans and robots work together safely. The cobot stops immediately whenever it is touched.
Magnetostriction: Reliable even in hollow shafts
Robots receive a sense of touch via torque and force sensors. Non-contact torque sensors open up completely new applications here. NCTE uses a specially developed technology of elastic magnetostriction for its sensor technology. This is based on the fact that the magnetic field of an object changes as a result of mechanical forces acting on it. In e-mobility, agricultural technology and Industry 4.0, the sensor solutions help to collect data in a simple way and in real time.
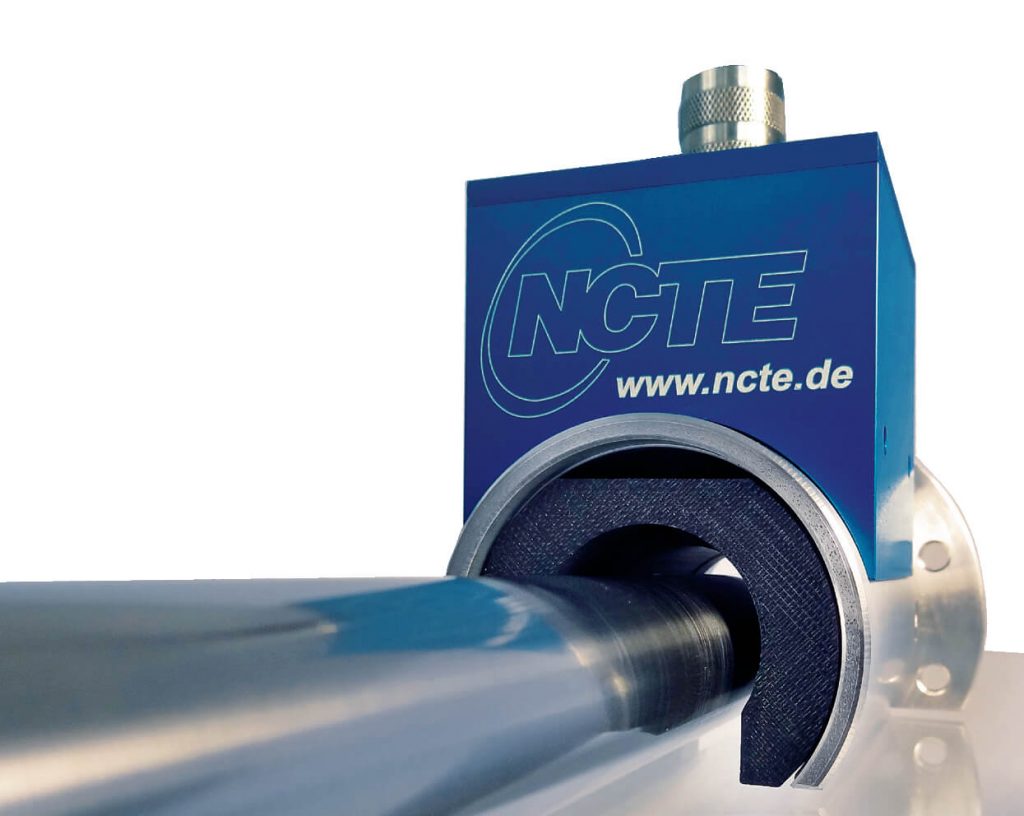
Magnetostrictive sensors measure forces on a shaft without contact, wear-free, without condensation and in harsh industrial environments.
In robotics, NCTE magnetizes the existing shaft in the joints in a patented process. It becomes the “transmitter. A freely configurable mini-sensor detects the changes in the magnetic field without contact, even several millimeters away from the shaft, and evaluates them. No further intervention in the original design of the joint is necessary – it remains light and compact.
With this method, even hollow shafts with bore diameters of 6 mm or more can be magnetized with internal power cables to form primary sensors. This makes it possible to run supply lines for the drive motor of the next axis or control, sensor and pneumatic lines for the gripper inside the axis. The robot is freed from cable restraints and can move much more easily.
The decisive advantage of the magnetic technology is the contact-free torque measurement. This makes the sensor extremely robust, especially in harsh industrial environments. Optical laser scanners can experience problems due to stray light, dust or dirt. Strain gauges struggle with long-term stability under severe temperature and load changes. Operation of NCTE magnetic technology, unlike strain gauges, is completely wear-free. The generated magnetic field is long-term stable and insensitive to external influences such as vibrations as well as high rotational speeds and temperatures.
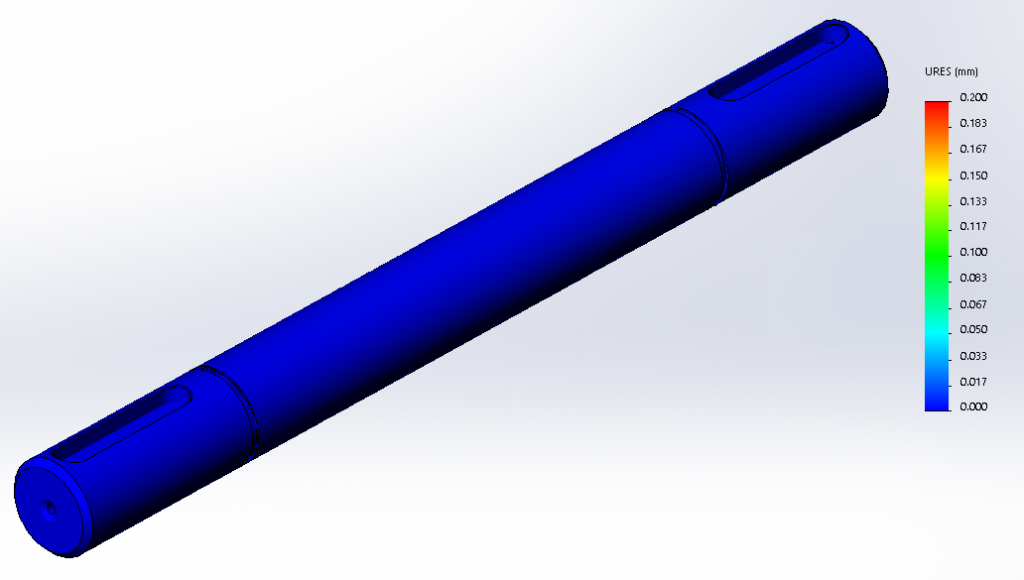
NCTE uses a specially developed technology of elastic magnetostriction for its non-contact sensor technology. Here in the CAD simulation: A force on the shaft changes the lattice structure of the introduced magnetization.
To ensure that the machines complete work orders “sensitively”, torque-carrying shafts, axes and joints in the robot arms are equipped with sensors. Here, NCTE realizes optimized geometries for the respective robotics application together with the partners. The torque sensors precisely detect any change in forces, with sampling rates of over 10 kHz. The sensors deliver the data to the customer interface in real time, enabling high dynamics of robot movements.
The sensor solutions can also combine torque measurement and parallel bending measurement in two axes in a single sensor. Several miniature secondary sensors are combined for this purpose. They collect different performance data simultaneously, e.g. torque, shear and bending. This brings advantages especially in applications with complex motion sequences and unpredictable occurrences. Especially important: The constant force feedback enables the robot to learn. At each position, the coordinates and frame measurements of the work cycle are stored. Via the force measurement, the robot learns which torques and forces are to be maintained in the respective work step.
How high the accuracy of the torque sensors used must be depends on the particular application of the robots. For closed-loop control, sensors with a very high precision are used for both the smallest and larger forces.
How cobots grip safely and tamely
Collaborating robots are only used in close proximity to their human colleagues in compliance with strict safety regulations. This safety is provided by sensor technology. If a cobot equipped with torque sensors touches a human standing in the vicinity, it stops immediately. This works reliably even with the smallest of touches.
In addition to safety, a key aspect of robots is the precision and repeatability of their work steps. For example, when components that were previously assembled by hand rather than in pick-and-place machines, such as electronic components for the automotive industry or smartphone housings, are to be assembled with the utmost precision and repeatability. Or when robots test touchscreens, and are only allowed to operate them with minimal force.
So far, these intelligent robots have been used primarily in industry. But smart robots are now also making inroads in agriculture, medicine and retail. They will increasingly become part of our everyday lives. In the care sector, robots will also take over human tasks in the future. In addition to eyes and ears, they also need the necessary sense of touch. Intelligent sensors keep the senses together.